
Filtering and State Estimation
This project was completed for AEROSP 567: Statistical Inference, Estimation and Learning. Implemented a variety of Gaussian Filters along with a particle filter with a bootstrap and optimal proposal.
Relevant Skills and Topics:
Python
Gaussian Filters
EKF
UKF
Gauss-Hermite KF
Particle Filters
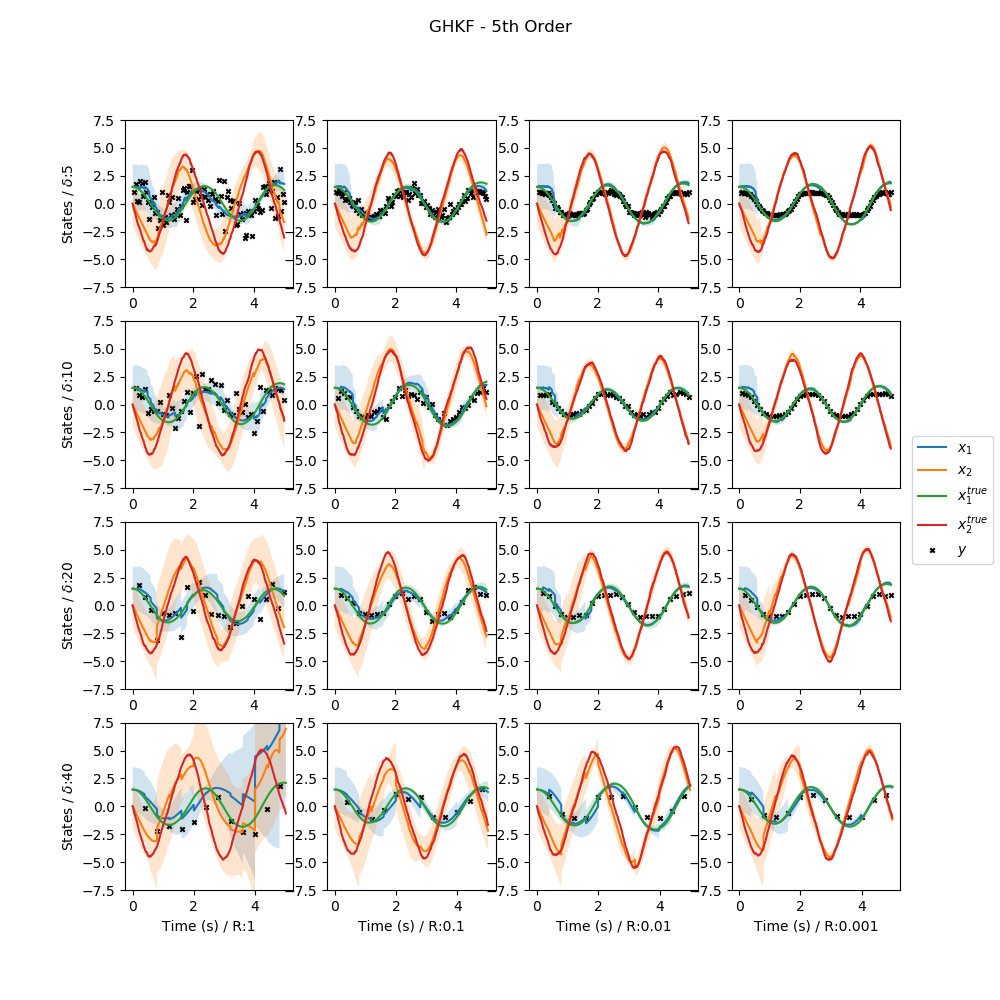
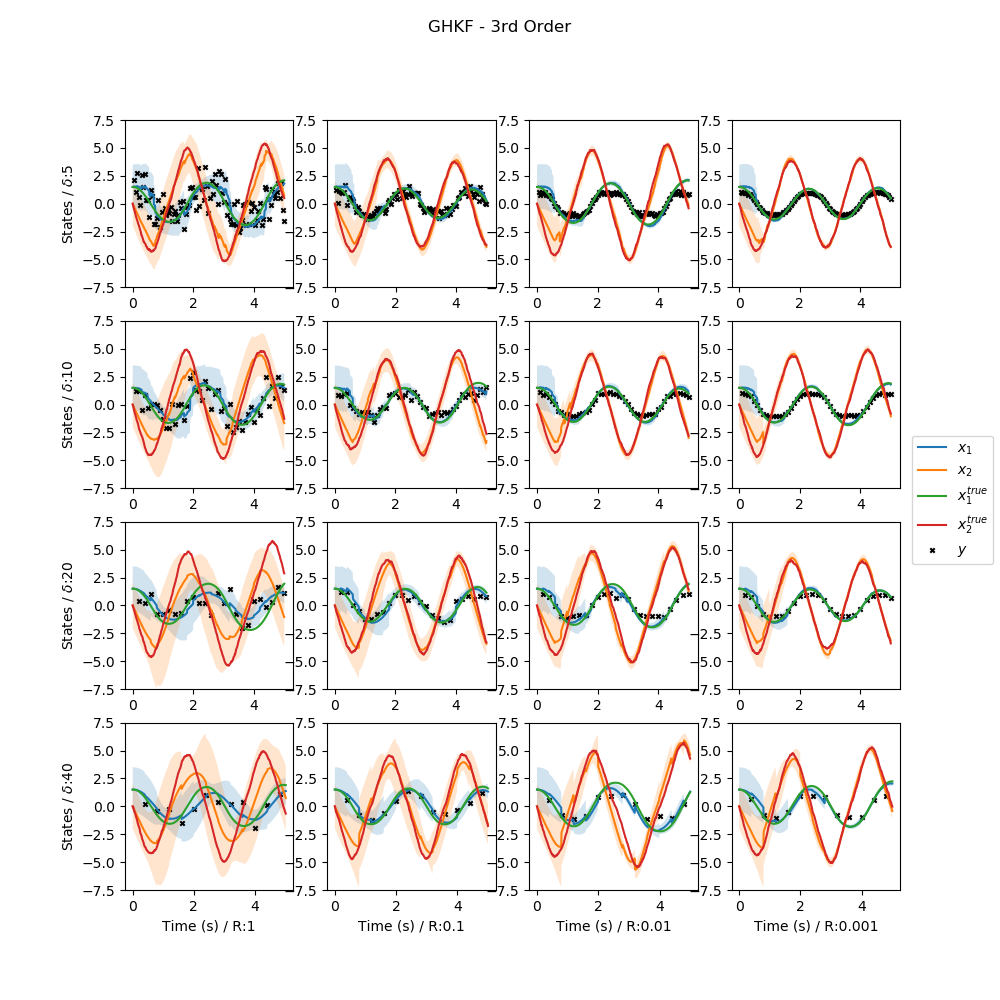
Task for this project was to implement filtering algorithms from scratch for angular position and velocity estimation for a pendulum system with varying measurement noise and data query frequency.
Implemented Extended Kalman Filter for a first order linearization of the nonlinear system, UKF with 5 points to perform quadrature integration at the Unscented points with associated weights, 3rd and 5th order Gauss Hermite to perform quadrature integration.
For the particle filter, implemented the bootstrap proposal, which is the dynamics of the system of the proposal for the Importance Sampling step and the optimal proposal, which is the proposal that aims to minimize the variance of the weights of the particles.
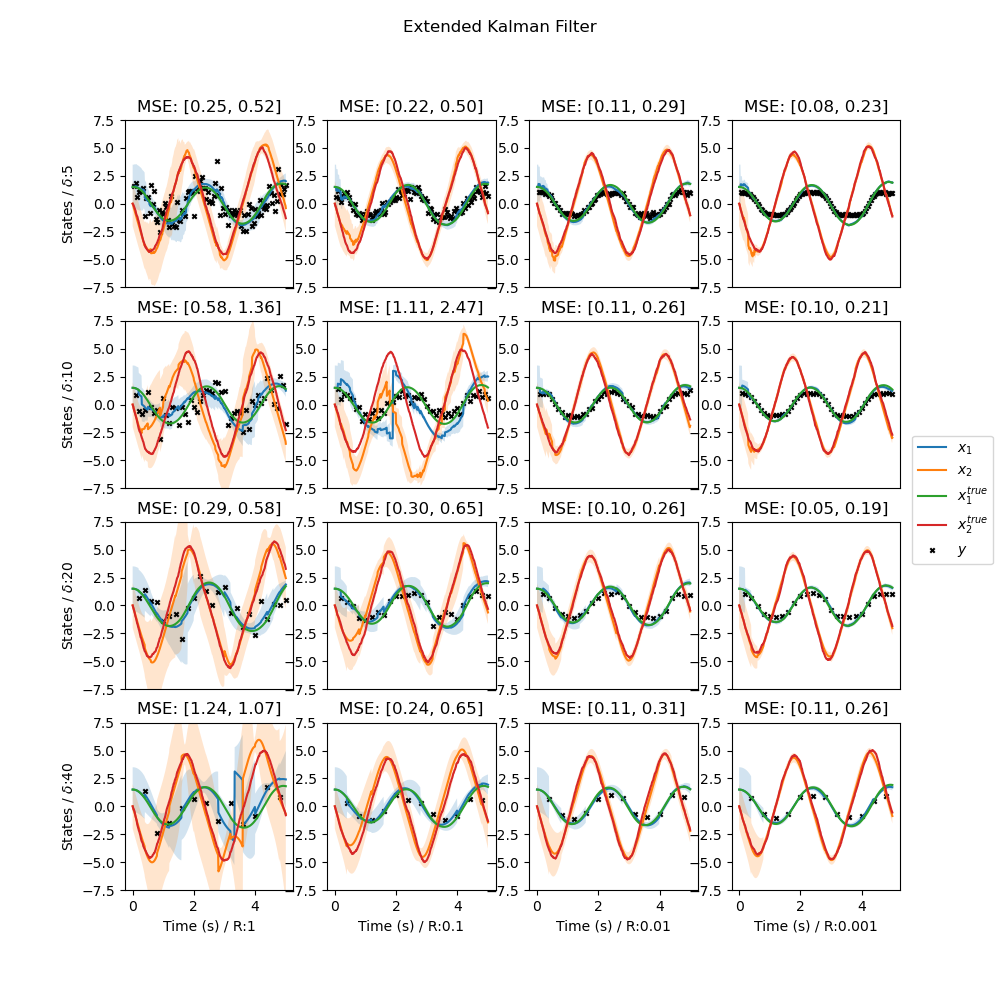
Extended Kalman Filter State Estimation for Pendulum System
3rd Order Gauss-Hermite Kalman Filter for State Estimation
5th Order Gauss-Hermite Kalman Filter for State Estimation
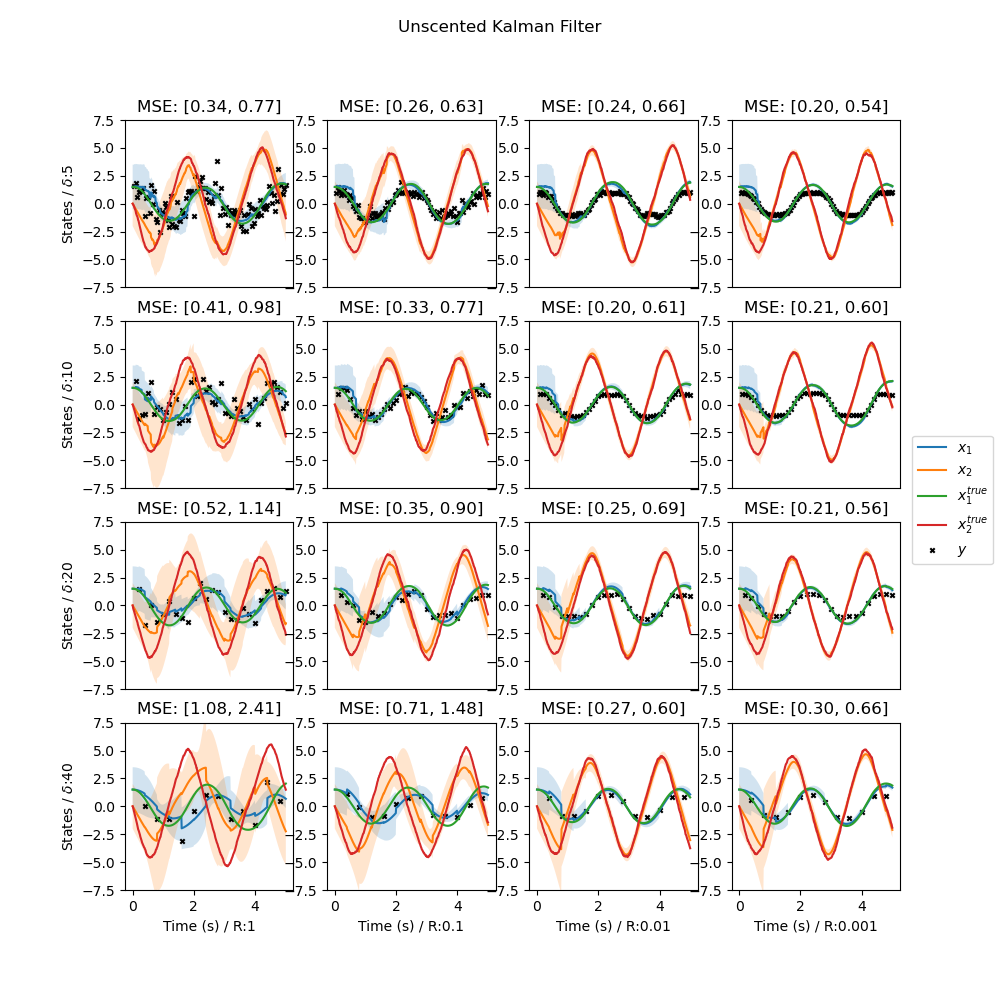
Unscented Kalman Filter for state estimation
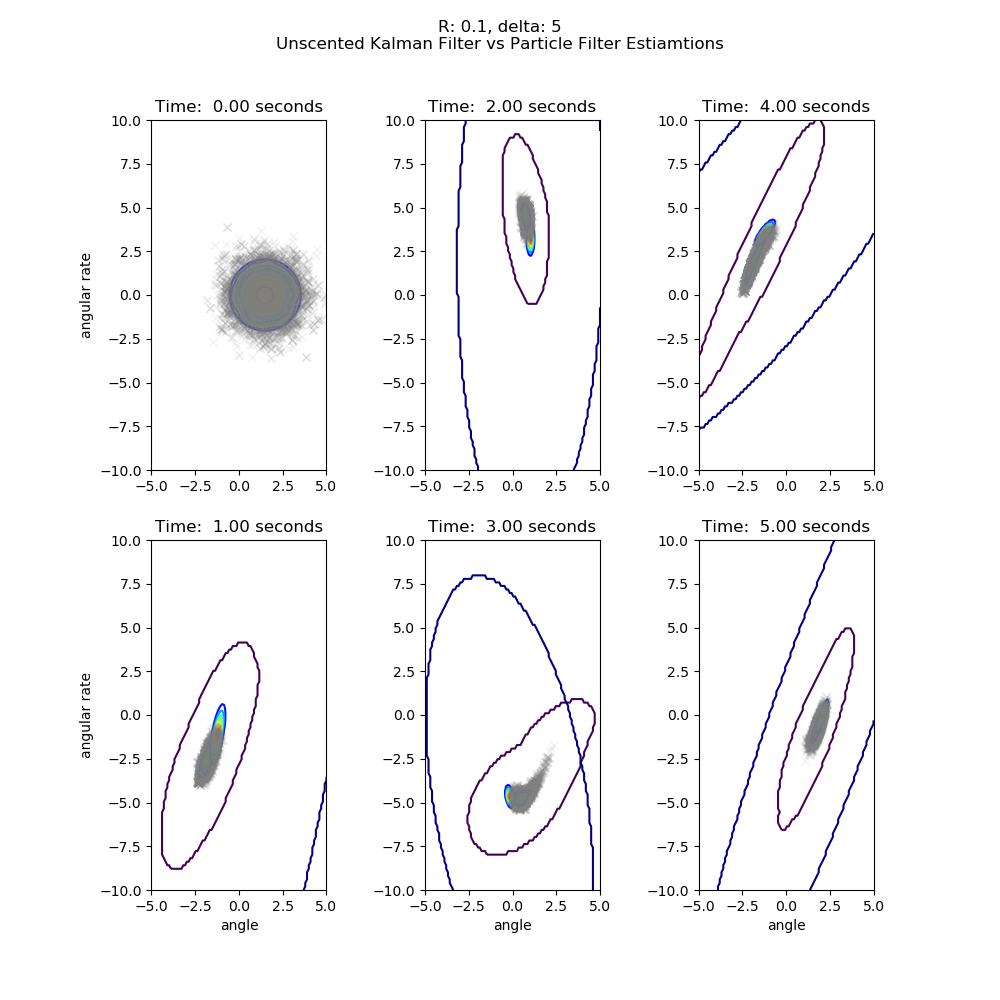
Particle Filter vs. UKF for state estimation, displaying the empirical distribution that the particle filter is capable of representing.